据统计我们一生当中80%的时间是待在室内,但GPS却不能在室内运作。心理学家说,人们对周遭环境不了解是会有恐惧感的,尤其在室内的封闭空间更加如此。想一想你曾在地下停车场花了多少时间找路?那种找不到出口出去的感觉是不是很糟?
室内定位导航有着巨大的需求和广阔的前景:在商业场景下,商店希望消费者进店消费时可以主动发送一些促销折扣,可以应用到手机购物、移动电子商务、个性化广告/优惠信息。用户会希望能够直接获取商店或者所需产品的位置。在机场、医院、会展中心、大型停车场等场所找登机口、找医院科室、找展位、找车,太多太多需要导航定位。最后也是最重要的,家长不用再担心孩子走丢了,通过室内定位技术和室外定位技术的完美结合可以实时跟踪孩子的位置。
室内定位技术
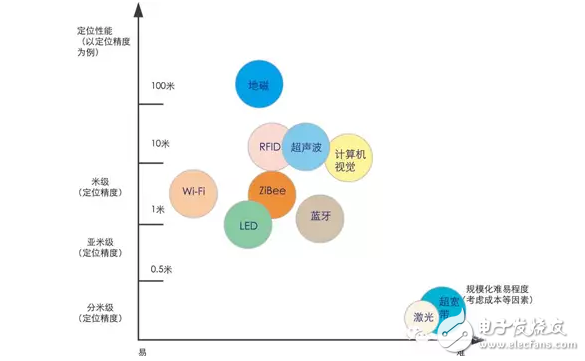
多方面的需求推动了室内定位技术的发展。 目前室外定位技术成熟、市场机制良好、应用广泛。然而室内无GPS信号无法进行定位,但人们大部分时间是处在室内,故对室内定位也有强烈的定位需求。室内定位的技术分支多样,下图是各种室内定位方案的对比图:

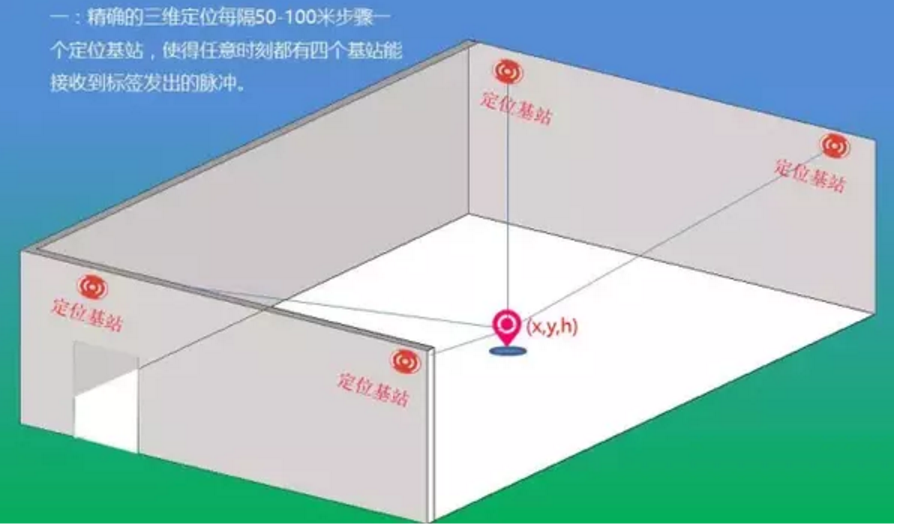
1、UWB(超宽带)脉冲信号
超宽带定位技术是一种全新的、与传统通信定位技术有极大差异的新技术。它利用事先布置好的已知位置的锚节点和桥节点,与新加入的盲节点进行通讯,并利用三角定位或者“指纹”定位方式来确定位置。
由多个传感器采用TDOA和AOA定位算法对标签位置进行分析,多径分辨能力强、精度高,定位精度可达厘米级。但UWB难以实现大范围室内覆盖,且手机不支持UWB,定位成本非常高。
超宽带通信不需要使用传统通信体制中的载波,而是通过发送和接收具有纳秒或纳秒级以下的极窄脉冲来传输数据,因此具有GHz量级的带宽。由于超宽带定位技术具有穿透力强、抗多径效果好、安全性高、系统复杂度低、能提供精确定位精度等优点,前景相当广阔。但由于新加入的盲节点也需要主动通信使得功耗较高,而且事先也需要布局,使得成本还无法降低。

超宽带室内定位可用于各个领域的室内精确定位和导航,包括人和大型物品,例如汽车地库停车导航、矿井人员定位、贵重物品仓储等。
2、RFID的定位
射频识别室内定位技术利用射频方式,固定天线把无线电信号调成电磁场,附着于物品的标签进过磁场后感应电流生成把数据传送出去,以多对双向通信交换数据以达到识别和三角定位的目的。(感应门禁卡和商场防盗系统用的就是这种技术)
采用刷卡方式,根据阅读器位置对刷卡人员或设备进行区间定位。主要应用在仓库、工厂、商场广泛使用在货物、商品流转定位上、ETC、办公考勤等,无法进行实时定位,定位精确度低,不具有通信能力,抗干扰能力较差。
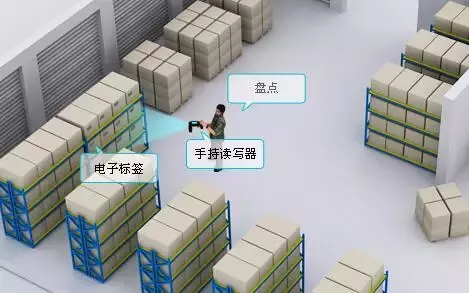
射频识别室内定位技术作用距离很近,但它可以在几毫秒内得到厘米级定位精度的信息,且由于电磁场非视距等优点,传输范围很大,而且标识的体积比较小,造价比较低。但其不具有通信能力,抗干扰能力较差,不便于整合到其他系统之中,且用户的安全隐私保障和国际标准化都不够完善。
3、ZigBee室内定位技术
通过若干个待定位的盲节点和一个已知位置的参考节点与网关之间形成组网,每个微小的盲节点之间相互协调通信以实现全部定位。作为一个低功耗和低成本的通信系统,ZigBee的信号传输受多径效应和移动的影响都很大,而且定位精度取决于信道物理品质、信号源密度、环境和算法的准确性,造成定位软件的成本较高,提高空间还很大。
ZigBee是一种新兴的短距离、低速率无线网络技术,这些传感器只需要很少的能量,以接力的方式通过无线电波将数据从一个节点传到另一个节点,作为一个低功耗和低成本的通信系统,ZigBee的工作效率非常高。但ZigBee的信号传输受多径效应和移动的影响都很大,而且定位精度取决于信道物理品质、信号源密度、环境和算法的准确性,造成定位软件的成本较高,提高空间还很大。
ZigBee室内定位已经被很多大型的工厂和车间作为人员在岗管理系统所采用。
4、超声波定位
超声波室内定位系统是基于超声波测距系统而开发,由若干个应答器和主测距器组成:主测距器放置在被测物体上,向位置固定的应答器发射同无线电信号,应答器在收到信号后向主测距器发射超声波信号,利用反射式测距法和三角定位等算法确定物体的位置。
应用案例的代表是Shopkic,在商店内安装超声波信号盒,手机麦克风检测到声波,从而实现定位,主要用于店铺的签到。超声波在空气中的衰减较大,不适用于大型场合,加上反射测距时受多径效应和非视距传播影响很大,造成需要精确分析计算的底层硬件设施投资,成本太高。
5、 LED定位系统
通过往天花板上的LED灯具实现,灯具发出像莫斯电报密码一样的闪烁信号,再由用户智能手机照相机接收并进行检测,定位精度可以在1米之内。LED定位需要改造LED灯具,增加芯片,增加成本,红外线只能视距传播,穿透性极差也极易受灯光、烟雾等环境因素影响明显。定位效果有限。比较适用于实验室对简单物体的轨迹精确定位记录以及室内自走机器人的位置定位。尽管如此,LED定位是一种很有潜力的室内定位技术。
6、地磁和计算机视觉定位
目前这两类产品大多用于军事及科学探测,如军事上的水下导航常用的地磁导航,火星车的导航用到了计算机视觉导航。
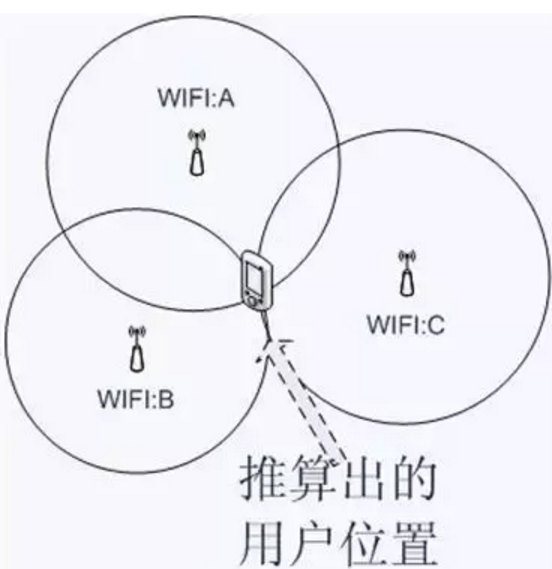
7、Wi-Fi定位
由于Wi-Fi网络的普及,变得非常流行。
Wi-Fi定位可以达到米级定位(1~10米), Wi-Fi定位技术有两种,一种是通过移动设备和三个无线网络接入点的无线信号强度,通过差分算法,来比较精准地对人和车辆进行三角定位。另一种是事先记录巨量的确定位置点的信号强度,通过用新加入的设备的信号强度对比拥有巨量数据的数据库,来确定位置(“指纹”定位)。
Wi-Fi定位可以在广泛的应用领域内实现复杂的大范围定位、监测和追踪任务,总精度比较高,但是用于室内定位的精度只能达到2米左右,无法做到精准定位。由于Wi-Fi路由器和移动终端的普及,使得定位系统可以与其他客户共享网络,硬件成本很低,而且Wi-Fi的定位系统可以降低了射频(RF)干扰可能性。
但是iOS不支持Wi-Fi室内定位(Apple把Wi-Fi底层的东西锁住了,开发者无法得知一些Wi-Fi重要讯息),无法做到精准定位且响应速度不高。Wi-Fi定位适用于对人或者车的定位导航,可用于医疗机构、主题公园、工厂、商场等各种需要定位导航的场合。目前市场上已逐步用ibeacon定位。
Wi-Fi定位适用于对人或者车的定位导航,可以于医疗机构、主题公园、工厂、商场等各种需要定位导航的场合。
8、红外线定位技术
红外线室内定位有两种,第一种是被定位目标使用红外线IR标识作为移动点,发射调制的红外射线,通过安装在室内的光学传感器接收进行定位;第二种是通过多对发射器和接收器织红外线网覆盖待测空间,直接对运动目标进行定位。

红外线的技术已经非常成熟,用于室内定位精度相对较高,但是由于红外线只能视距传播,穿透性极差(可以参考家里的电视遥控器),当标识被遮挡时就无法正常工作,也极易受灯光、烟雾等环境因素影响明显。加上红外线的传输距离不长,使其在布局上,无论哪种方式,都需要在每个遮挡背后、甚至转角都安装接收端,布局复杂,使得成本提升,而定位效果有限。
红外线室内定位技术比较适用于实验室对简单物体的轨迹精确定位记录以及室内自走机器人的位置定位。
9、蓝牙室内定位技术
蓝牙室内技术是利用在室内安装的若干个蓝牙局域网接入点,把网络维持成基于多用户的基础网络连接模式,并保证蓝牙局域网接入点始终是这个微微网(piconet)的主设备,然后通过测量信号强度对新加入的盲节点进行三角定位。
蓝牙室内定位技术最大的优点是设备体积小、短距离、低功耗,容易集成在手机等移动设备中。只要设备的蓝牙功能开启,就能够对其进行定位。蓝牙传输不受视距的影响,但对于复杂的空间环境,蓝牙系统的稳定性稍差,受噪声信号干扰大且在于蓝牙器件和设备的价格比较昂贵。
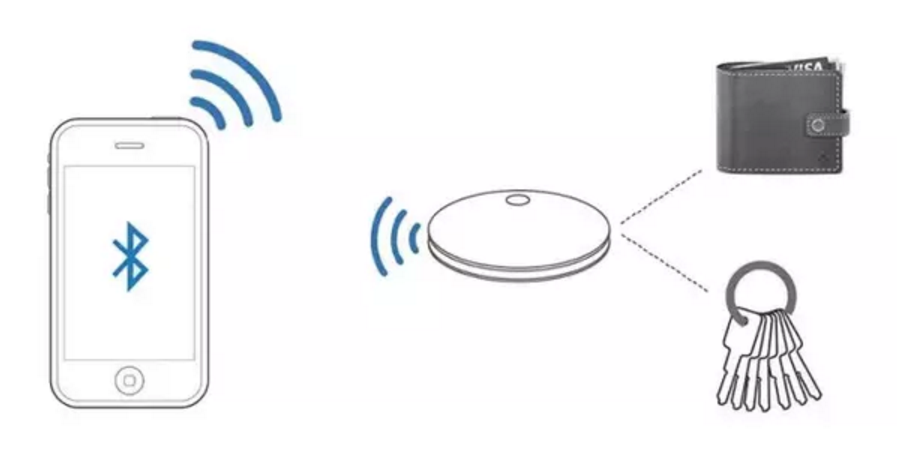
蓝牙室内定位主要应用于对人的小范围定位,例如单层大厅或商店。现在已经被某些厂商开始用于LBS推广。
室内无线定位算法
室内无线定位算法技术基本上归结于以下几类:
1、 近邻法
最简单的方式,直接选定那个信号强度最大的AP的位置,定位结果是热点位置数据库中存储的当前连接的Wi-Fi热点的位置。
2、三角测量法
通过信号的各种参数得到目标与AP的距离或者角度,用几何方法计算出位置。包括到达时间法、相对到达时间法、到达角度法、基于信号强度的测距方法,及其混合算法。
3、指纹法
就是事先把各个位置上的信号特征(各Wi-Fi的信号强度)测量一遍,存入指纹数据库。定位的时候,将当前的信号特征与指纹库中的进行匹配,从而确定位置。
目前室内的精准定位还较难实现,各种算法各有各缺陷。近邻法定位精度得不到保证;三角测量法理论上精度较高,但对于普通设备来说,时间、角度这些参数较难获取;指纹法前期地图绘制工作量大,而且一旦场地布置临时有变化各位置上的信号就会变化,从而导致定位不准。基站覆盖范围大,角度偏一点就会造成很大误差,更何况各种非视距和多径环境的影响,精度误差大。所以现在手机室内高精度定位大多使用多种算法融合。
室内导航定位有着广泛的应用前景,随着定位技术的进一步完善,不久的将来室内导航定位将应用到我们生活的方方面面,为人们带来更多便利。

{kind=link}
最新评论